
This year’s game needs a strong and reliable shooter, so the team spent a lot of time focusing on this system early on. The first step was to look at shooter designs from previous FRC games to understand what worked well and what did not.
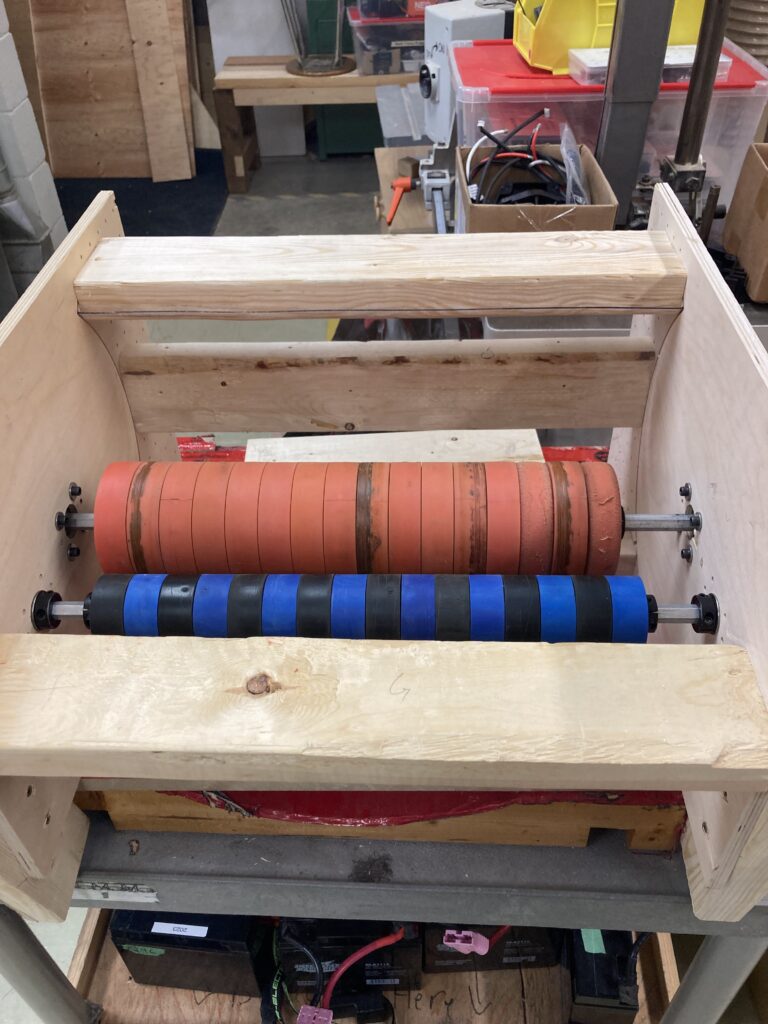
The team’s first quick prototype used 16 four inch stealth wheels and a piece of polycarbonate. The polycarbonate was held at different distances from the flywheels to test how much compression worked best. From these tests, the team found that the best compression was about 140 mm, or 5.5 inches.
Next, the team designed an S-shaped shooter and used a CNC router to cut panels for prototyping. They also made panels for a C-shaped shooter. This allowed them to test how the length of time the fuel stayed in contact with the flywheels affected power and consistency. The S-shaped shooter worked well, but it was very large and could not fit under the 22 inch trench. This helped the team understand that size and space are just as important as performance.

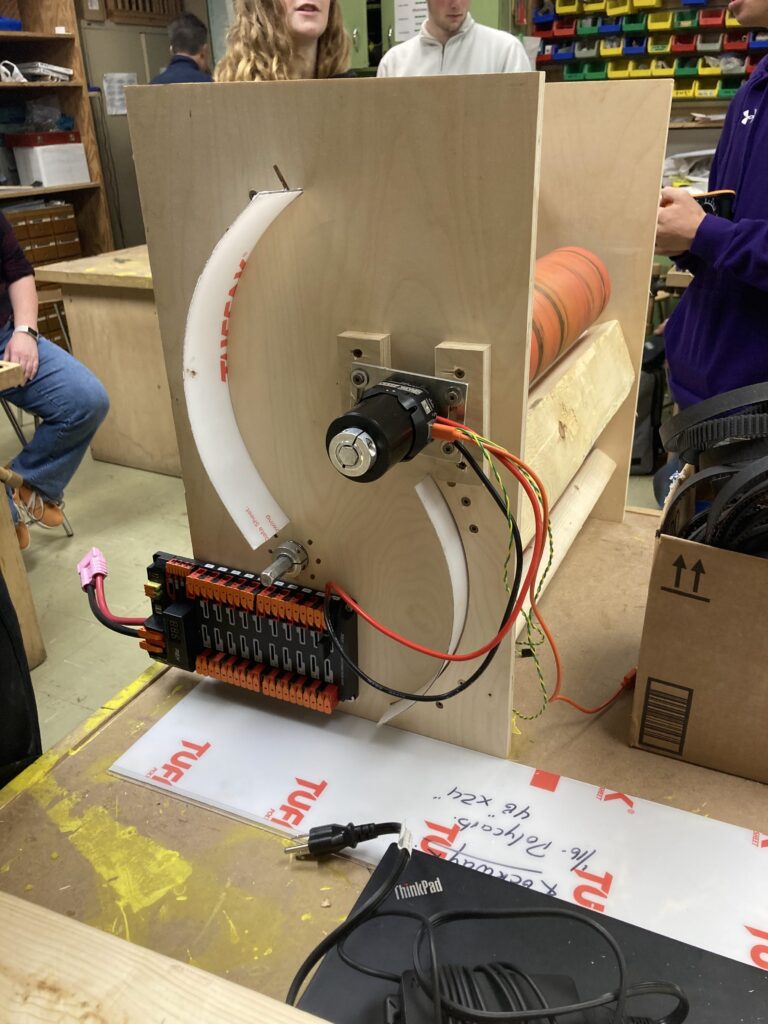

One important lesson the team has learned from past seasons is that using drills instead of motors during prototyping is fast, but not accurate enough. Drills do not allow good control over speed or power, which makes it hard to compare results to the real NEO motors. This year, the team improved their process by setting up a REV Power Distribution Hub connected to a battery and linking the motor directly to a computer using USB-C whenever possible.
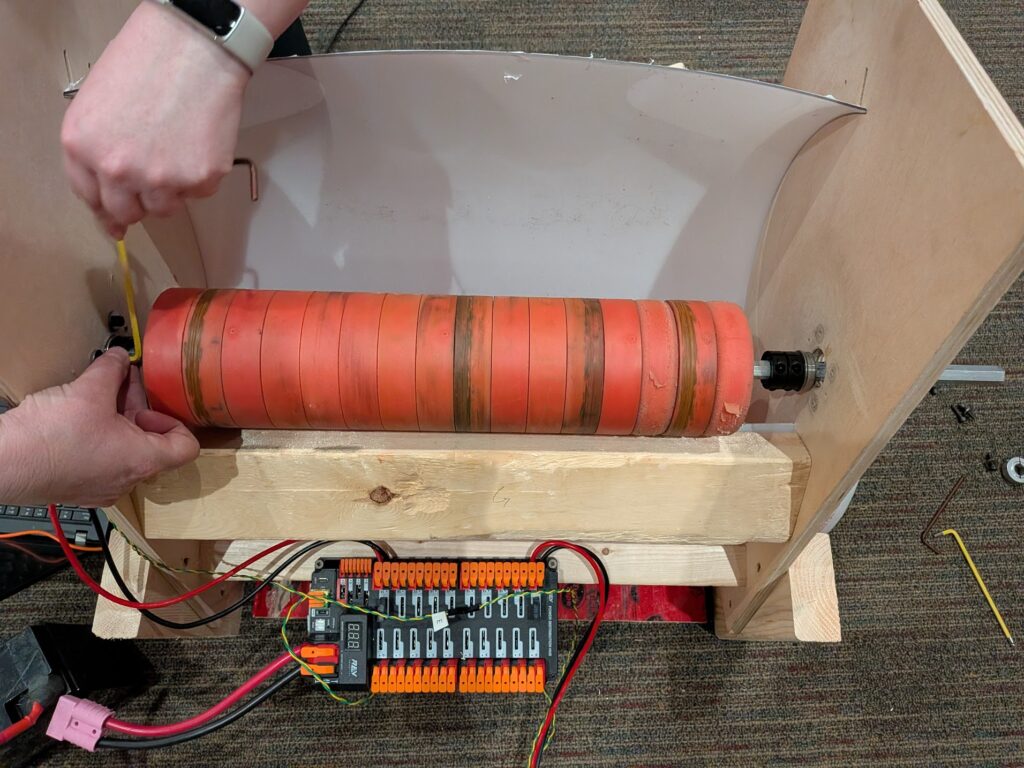
This setup allowed the team to use PID control to set a specific flywheel speed. They could also measure how much the flywheel speed dropped when a game piece touched the shooter. Each stealth wheel weighs 97 grams, and two extra weights were added that weigh 529.8 grams each. This means the total flywheel weight is 2,417.6 grams. Testing showed that the shooter was accurate as long as two game pieces did not enter the shooter at the same time.
The team is now reviewing the weight of the rest of the robot to see if more weight can be added to the shooter system. This work will help improve consistency and overall performance as the season continues.
The next steps for the shooter focus on improving accuracy and fitting the system onto the robot. One idea the team is exploring is adding a variable hood. This would allow the angle of the shooter to change, helping the team adjust shots based on distance and improve consistency during matches.
The team also needs to decide how the shooter will be mounted on the robot. Even the C-shaped shooter design is still too wide for the available space. To solve this, one of the students is working on a new CAD design that aims to make the shooter more compact while keeping good performance. This redesign will help ensure the shooter fits within the robot frame and meets all size constraints.