Competition Involvement
Team 8089 was 19-20-0 in official play and 25-29-0 overall in 2024.
As a member of the FIRST Canada – Ontario district, Team 8089 ranked #77 having earned 82 points.
ONT District Newmarket Complex Event
Team 8089 was Rank 16 with a record of 8-4-0
ONT District University of Waterloo Event – March 21 to March 23, 2024
Team 8089 was Rank 5 with a record of 7-8-0 and won the following awards:
- Creativity Award sponsored by Rockwell Automation
They competed in the playoffs as the Captain of Alliance 4 and were eliminated in the Double Elimination Bracket (Round 3) with alliance partners 2702 and 7022.
FIRST Ontario Provincial Championship – Science Division – April 3 to April 6, 2024
Team 8089 was Rank 31 with a record of 4-8-0
Robots@CNE – August 29 to September 1, 2024
Team 8089 was Rank 16 with a record of 6-9-0
They competed in the playoffs as the 2nd Pick of Alliance 7 and were eliminated in the Double Elimination Bracket (Round 2) with alliance partners 854 and 5036.
Design Goals
After building up a couple years of experience we wanted to become a main contributor to alliance points, and be intentional about all of our workflow. Because our tank drive had much less maneuverability than most highly competitive teams’ swerve drive, we wanted to design the robot to reduce the amount of turns our driver needed to do to intake and shoot notes.
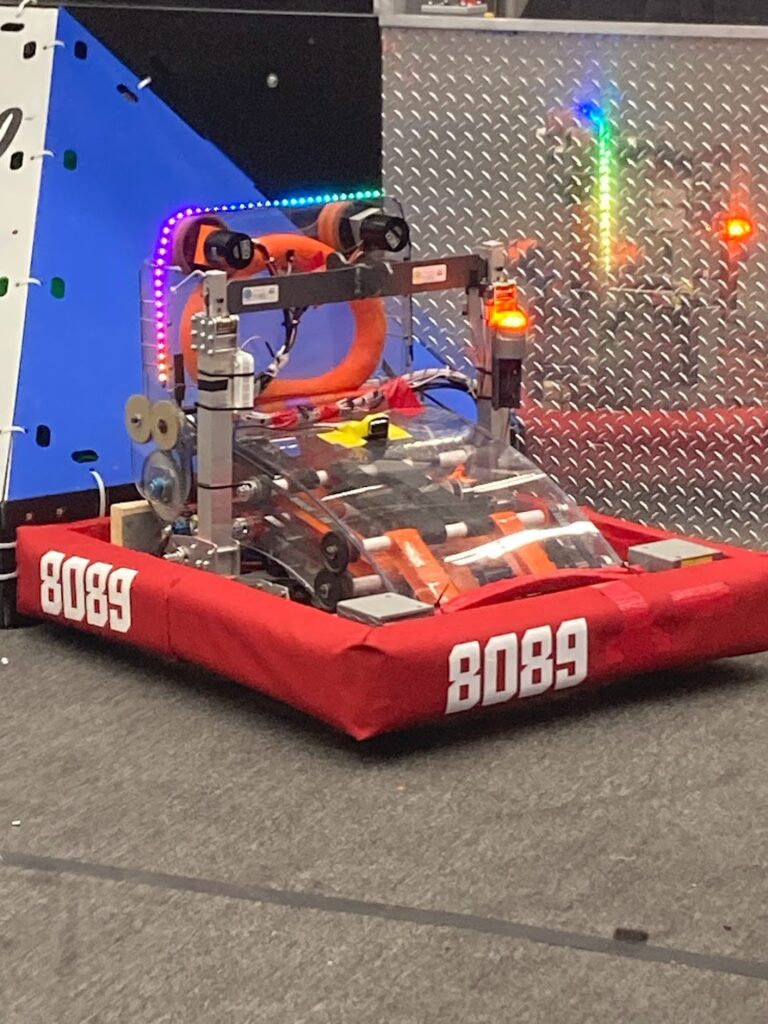
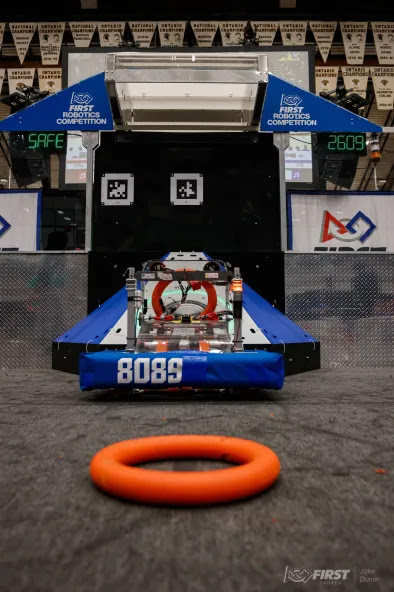
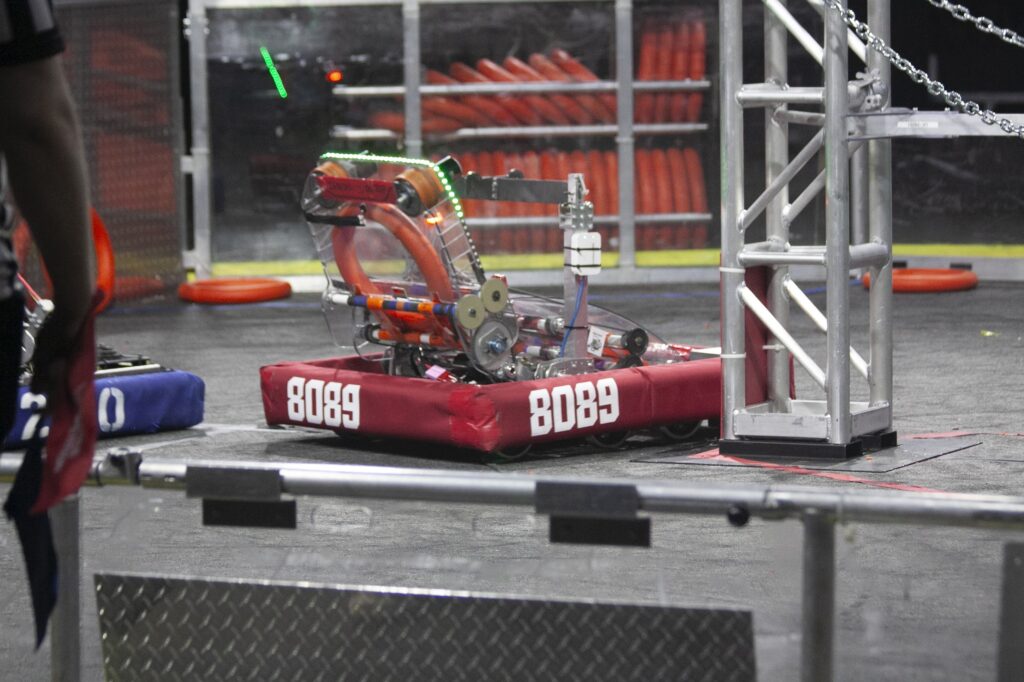
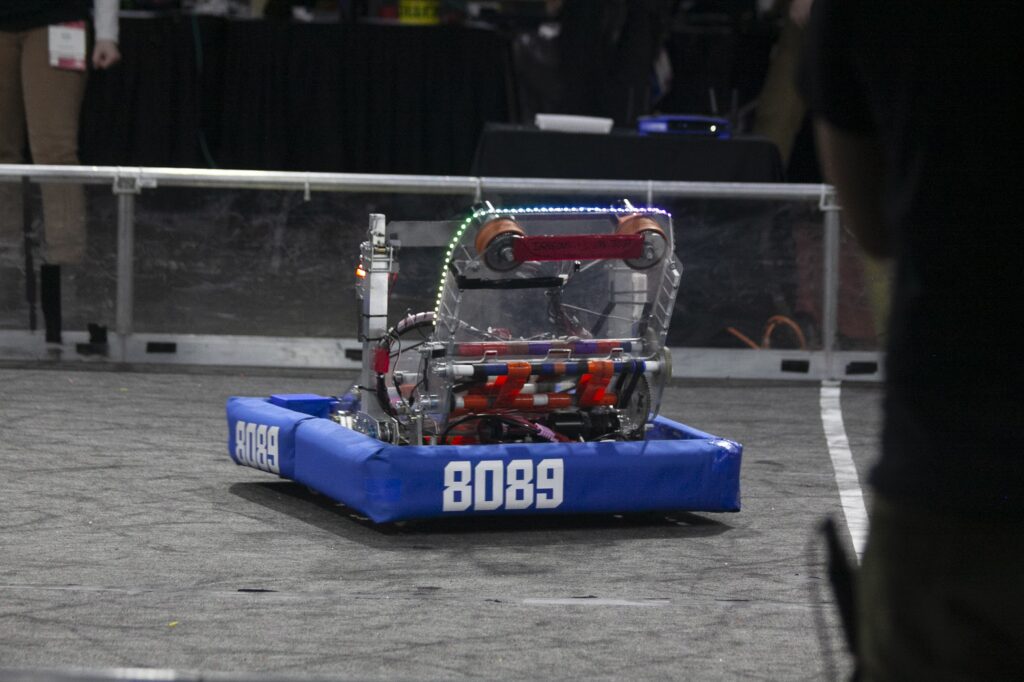
Robot Mechanisms
Our intake was designed specifically to pick up notes from a much wider area than most other robots, allowing us to reduce the maneuvering needed to intake notes. We elected to go with an under the bumper intaking allowing us to just drive over the note and it would touch and own the game piece. It featured one horizontal mecanum wheel on each side to draw game pieces in and a set of rollers to intake the note into the robot. The note then passed through a set of belts to the shooter, which was two flywheels and could be angled for shots from multiple spots. The LED lights around the shooter communicated the status of the note in the robot to the driver. We also had a new-and-improved climb with which we could hang solo or with another robot.
Match Playstyle
The intake and shooter on opposite sides of the robot allowed us to traverse the field quickly and our wide intake made for speedy intaking, making our cycle time comparable to highly ranked teams. Our time spent developing autonomous routines and doing driver practice at the WWFirst practice field greatly improved our performance, allowing us to be a main contributor of points to many of our alliances. One of our most celebrated achievemens was a 4 piece auto routine that we accomplished several times at the Waterloo competition which supported our best individual event rank in our history. We ranked 5th and we were the captain of alliance 4.